Project robotarm
3D model die we gemaakt hebben
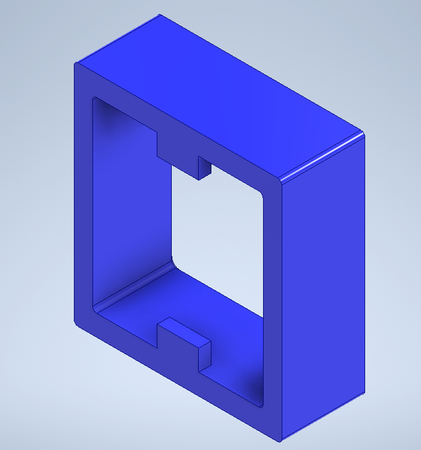
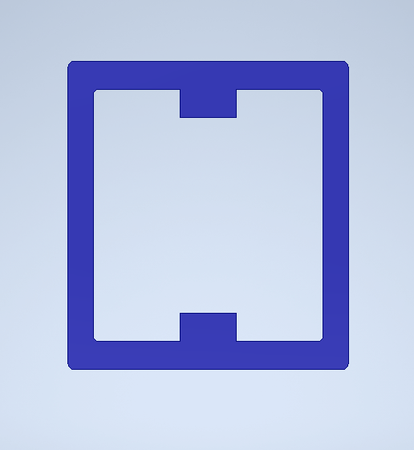
Design van Max
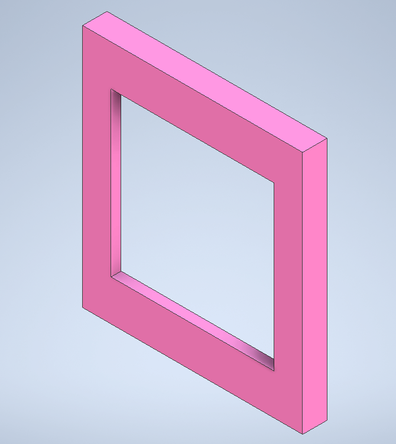
Mijn design
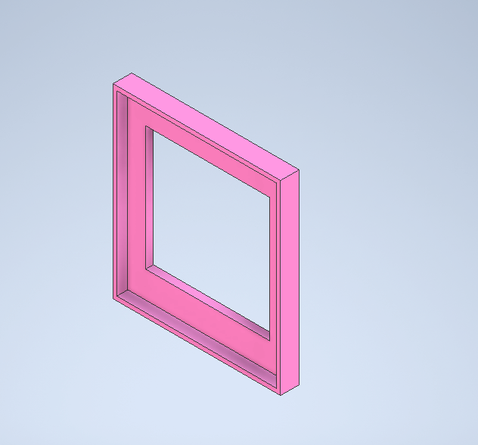
Liam zijn design
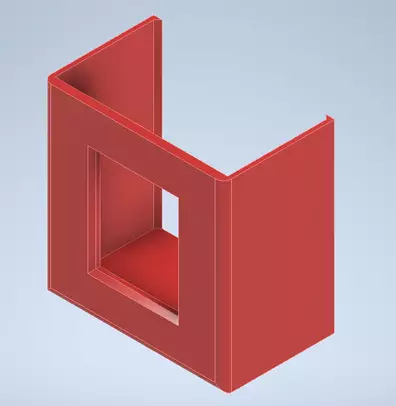
Design die we gaan printen
We hebben besloten om het design van max te kiezen
Robotarm programeren
Opdracht 1
Met opdracht 1 gingen we met de robotarm tekenen. We hebben een boter kaas en eieren veld getekend. Het ging soms wat minder goed omdat de robotarm te laag was ingesteld. Maar toen we de robotarm hoger hadden ingesteld ging het veel beter
Opdracht 2
Bij opdracht 2 moest er een blokje opgetild worden en terug gelegd worden. Toen ik het probeerde ging het eerst fout omdat ik was vergeten om bij het laatste punt een point neer te zetten in de code. Daarom liet de robotarm het blokje vallen.
Opdracht 3
Bij de 3e opdracht was het doel om de blokjes op elkaar te stapelen maar het blokje draait elke keer 90 graden. Dat ging erg goed, omdat we op het papier een blokje hadden overgetrokken. Zodat de robotarm de blokjes van dezelfde plek pakte.
Opdracht 4
Bij opdracht 4 moest de robotarm een blokje op een lopende band zetten. Maar dat is niet gelukt omdat de robotarm niet met mijn laptop wou verbinden. Het is mij alleen gelukt om ervoor te zorgen dat de robotarm een beweging maakt als de kleurensensor een bepaalde kleur ziet. Het is uiteindelijk alleen gelukt om 1 kleur te doen.

Opdracht 5
De robotarm moest de auto oppakken. Daarna moets de auto 180 graden gerdraait worden en op de andere kant neergezet worden zodat de auto verder kan rijden. In het begin zonder sensor en daarna met sensor. De sensor zag de rode auto beter dan de zilveren auto omdat de zilveren auto het licht van de sensor reflecteerde. dus hebben we ervoor gezorgd dat de sensor de banden ziet, want de banden reflecteren het licht niet.

Opdracht 6
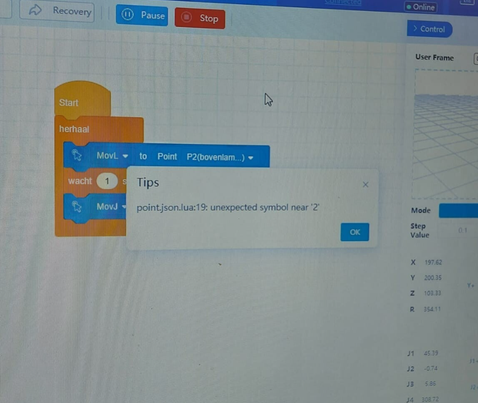
Bij opdracht 6 was het de bedoeling om met een robotarm een peertje uit de houder te halen en in een lampfitting te schroeven. De De robotarm had geen probleem met naar alle punten gaan. Alleen was het zo dat de code niet volledig gerund kon worden omdat er error's waren
Dit was de error die we kregen als we de code wouden runnen
Opdracht 7
Bij opdracht 7a was het de bedoeling om met de robotarm 2 stippen te maken op een A3 papier. Het ging niet gelijk goed omdat de verf er niet uit wou komen. Dat kwam omdat de snelheid te laag was. Maar toen ik de snelheid hoger had gezet werkte het beter.
Bij opdracht 7b was het de bedoeling om met de robotarm een vierkant te maken. Daar ging het minder goed omdat de z positie niet goed was, daardoor ging de robotarm te ver naar beneden. De robotarm was ook te hoog ingesteld en verf kwam er niet uit. Maar nadat we dat hadden aangepast ging het een stuk beter.

Maak jouw eigen website met JouwWeb